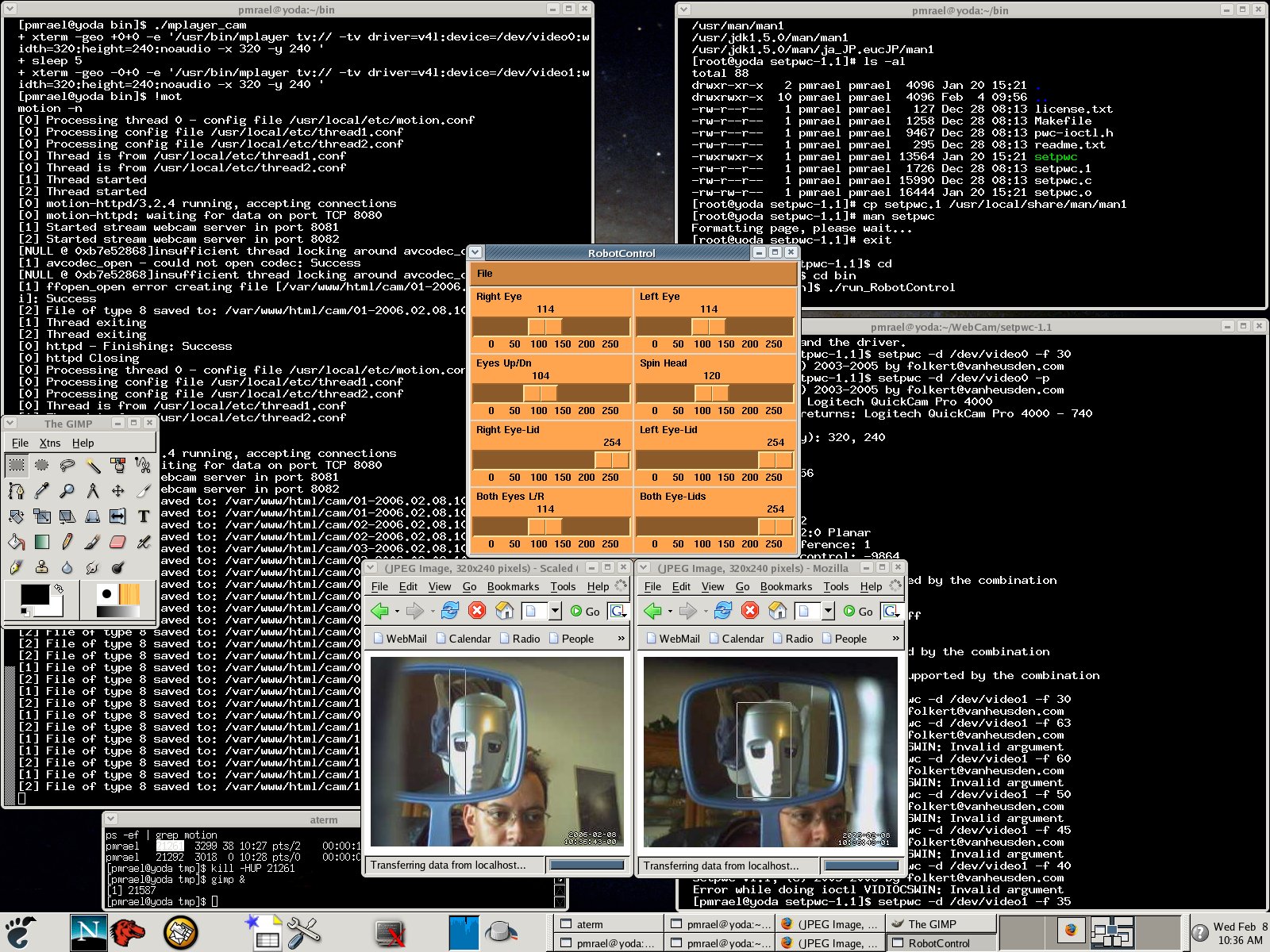
Self portrait of R.Max through both new eye cams. Image stream is
in computer in two windows via "Motion" open source software. Also,
RobotControl Perl/Tk app is controlling servos. Gimp was used for snapshot.